
Through my Engineering Physics and Mechanical Engineering education, I have developed a propensity for creative problem solving, an anchor in teamwork, and a love of all things innovative.
ENGINEERING
MORE SAMPLES



Engineering Graphics Final Project
The Challenge:
To create a collaborative 3D CAD model of a theoretical product using Solidworks. A team of five must create an assembly along with the corresponding part and assembly engineering drawings.
The Solution:
Our team designed a product called the "Window Bug" which emulates a rumba that cleans your windows. We went through a basic design process and each created up to five parts to be added to the assembly. We collaborated on the construction of a team binder containing part drawings a paper detailing each element of the design.


HOUND Research Project
The ability to detect gases in various concentrations and track the concentration over time is highly useful over a wide range of disciplines. The Hyper-Olfactory Unique Nasal Device (H.O.U.N.D) is the proposed solution that can be customized for various applications. The goal of the proposed research is to find practical uses for such a device in a variety of applications ranging from personal home use to large scale safety in industry.
My team members and I collaborated with a computer science team to bein to create an application utilizing augmented reality. We aimed to create a visualization of the imput of our sensor arrays in different locations.
FTC Robot Challenge
The challenge:
To construct a functional and successful Tetrix robot to compete in a mock FTC Cascade challenge in three weeks.
The solution:
A partner and I designed a robot that was balanced and effective using single-joint arm and a sweeping mechanism to pick up the balls. The hardware worked seamlessly with the software that I had created to allow easy user control of the robot. The movements were controlled and precise. I also created an autonimous program that was able to repeatedly and successfully complete one of the most difficult tasks. We streamlined both our hardware and software to be simple and easy to use while being complex and dynamic enough to conquer the challenge.
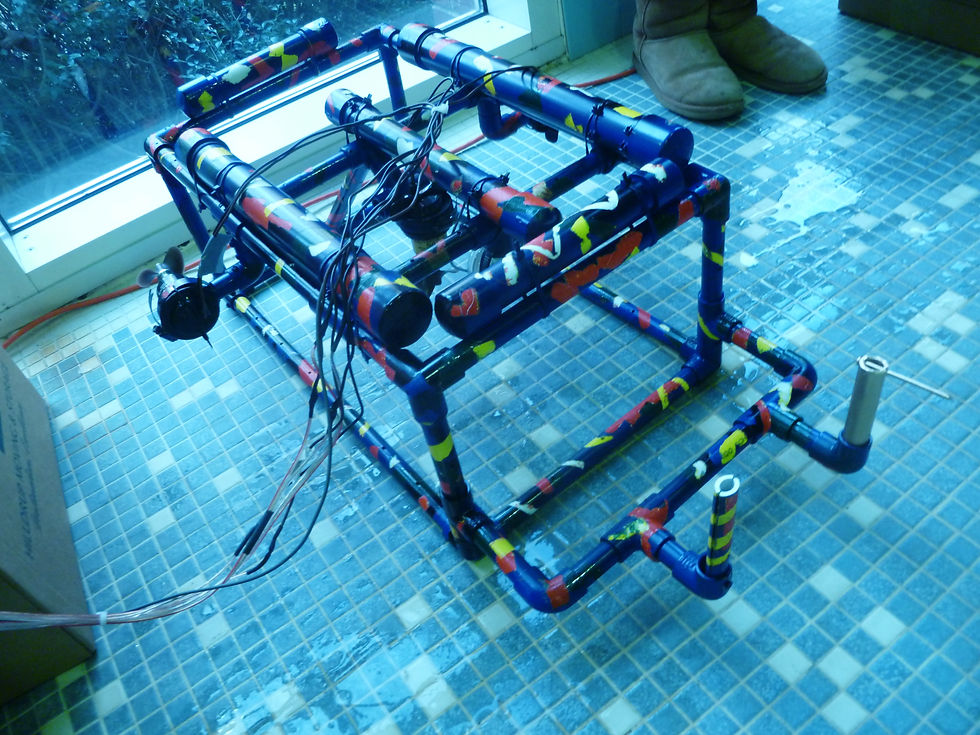


Underwater Remote Operated Vehicle (ROV)
The challenge:
Design and build a Remote operated vehicle using PVC pipes, 3 motors, and other scraps found around our workshop. Working in teams, we had to make the underwater ROV with the correct amount of buoyancy to be controlled by a wired control box to complete several tasks using the tools we designed and installed.
The Solution:
We designed a vehicle with the correct amount of buoyancy to be able to be controlled underwater and placed the motors in locations for optimum mobility. We designed our tools to be as simple as possible to eliminate possible error during the task.


